非结构环境(一种没有明确结构、不规则的环境,即目标周围的环境信息非固定,不可知)三维实例级物体的检测在智能监控,视觉导航,人机交互,智能服务等领域有着重要的应用。为实现目标检测中的两个关键的子任务:目标识别和目标定位,
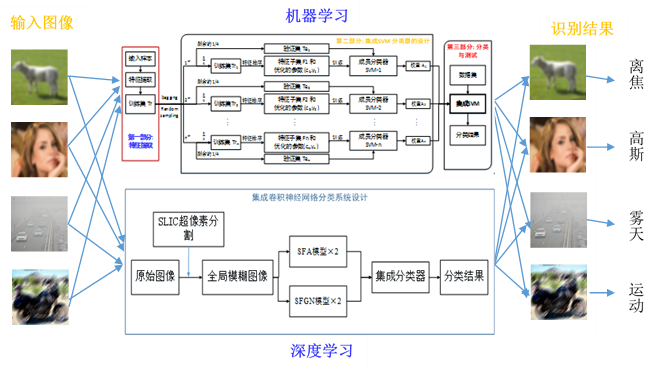
(1) 利用传统机器学习方法,设计实现了级联式分类器,在复杂多变的应用环境(多视角,多尺度,不同背景,不同光照条件)下,算法能以平均20fps 的处理速率得到高于80%的平均召回率(recall)与准确率(precision);
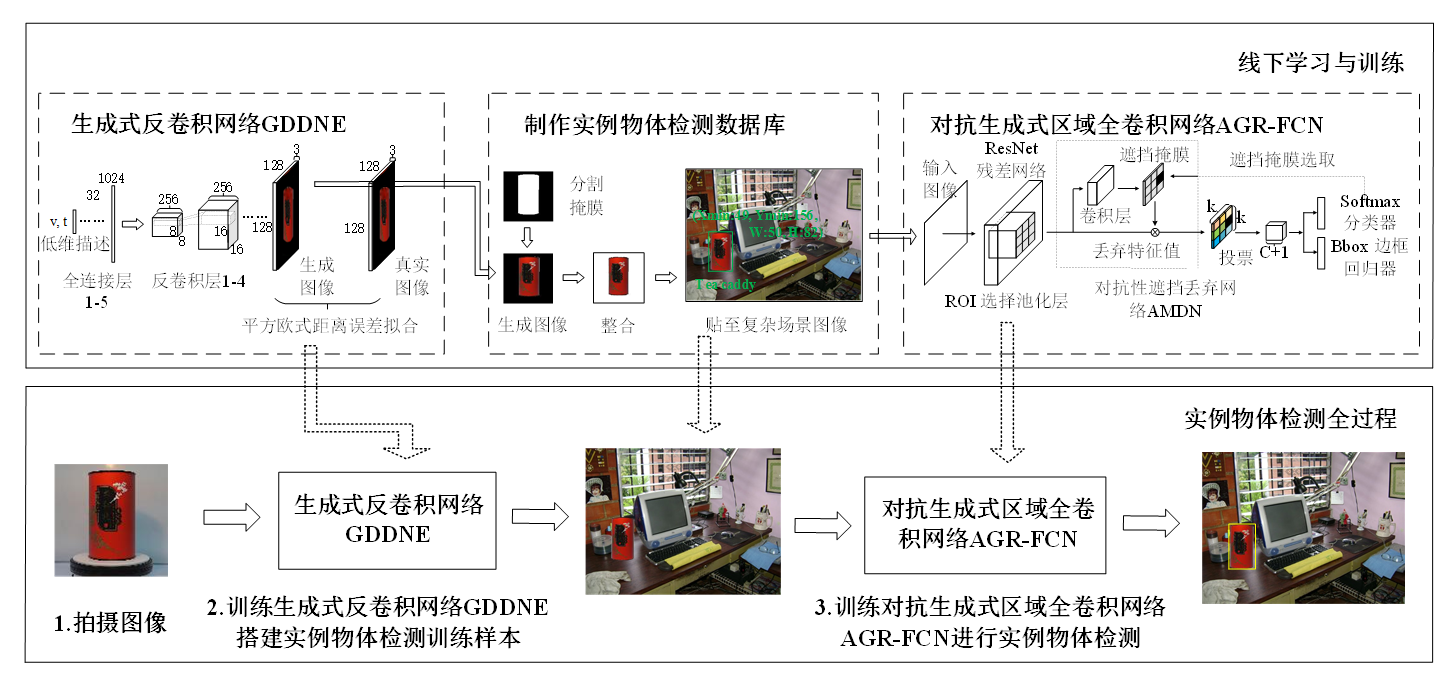
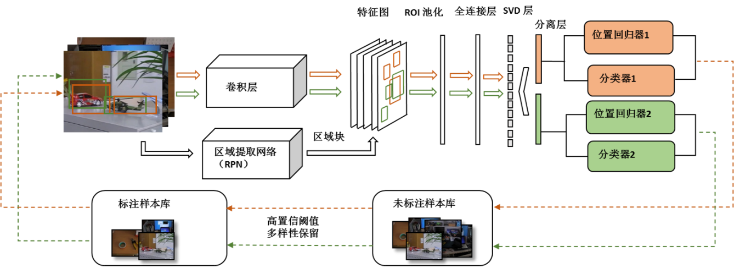
(2) 利用深度学习方法,采用生成式反卷积网络GDDNE与对抗生成式网络AGR-FCN相结合的策略,与另一款设计的保持特征向量独立性的半监督神经检测网络SVD-RCNN一样,只需要5%的手工标注训练数据外加95%的生成式标注数据或非标注训练数据,就可获得与使用100%手工标注的真实训练数据进行训练后相当的检测精度效果。